Projects
Some of my most recent engineering projects
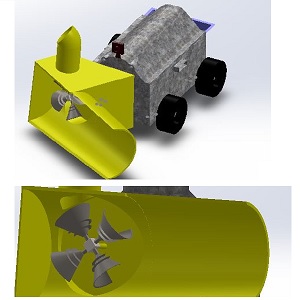
Autonomous Snow Shoveling Robot
A robot able to clear snow off of a standard suburban driveway in any Canadian city was designed.
It was able to clear a 2-car driveway in approximately 2 minutes. This was completed as part of the final year design project (Capstone Project).
The full report is available by request.
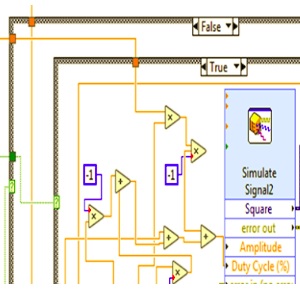
Linear Fume Tracker
A fume tracker system was designed and prototyped so that it would autonomously follow an object along a linear path,
while maintaining a set distance away from the object at all times.
The control system and interface was designed with LabVIEW, with the use of an infrared proximity sensor peripheral connected to a data acquistion board to determine the system's relative position.
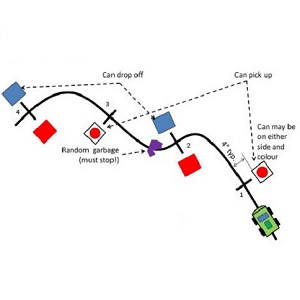
Automated Guided Vehicle
An automated guided vehicle (AGV) was designed and programmed to progress through an obstacle course and perform several tasks such as picking up cans and dropping them off at set locations, similar to industrial material handling systems.
This system was prototyped using a preconstructed robot car (called the "MechBot"). An Arduino UNO microcontroller was utilized to control the car throughout the entire course, while
a secondary control module built from a LEGO NXT kit was interfaced with the Arduino and used as a robot arm. The microcontroller used to control the robot arm was called the "EVShield" in this project.